研究内容
目指すところ
動的システムのダイナミクス(動き)をデザインするための学術的基盤が「システム制御理論」です. 本研究室では,システム制御理論の開発とそれを先端科学分野や産業界に展開します. 特に,「物理と情報をつなぐ」という視点から研究を実施し,新しい未来を拓く動的システムの創成に挑戦します.
研究テーマ
● マルチエージェントシステムの制御と群知能化

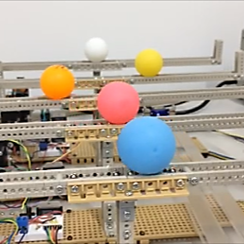
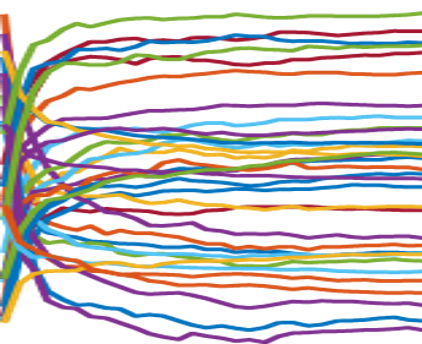
マルチエージェントシステムとは,複数のエージェントの局所的な相互作用をもとに大域的な機能を発現するシステムのことです [東ほか,マルチエージェントシステムの制御,コロナ社,2015].近年,産業界で大きな注目を集めているスマートグリッド,スマート物流, 自動車の自律化(自動運転)を実転する技術として,また,システム生物学や群知能学の数理モデルとして重要な研究対象になっています. 本研究室では,エージェント間の情報の流れに注目してマルチエージェントシステムの解析と制御のための理論を構築します. さらに,マルチエージェントシステムを,未知の大規模システムを制御する「群知能」にまで昇華させるための研究を実施します.
● 量子化制御
大規模システムの制御においては,現実世界に存在する物理系をセンサで計測し,サイバー空間でその情報を分析して制御入力を生成します. 現実世界の物理量は連続的な値になるのに対し,サイバー空間で扱われる情報は離散的な値となります.このような連続値の物理量と離散値の信号が 混在したときに必要となるのが量子化制御です.本研究室では,サイバー空間で扱う情報量と現実世界での制御性能の関係を明らかにし, それを基に量子化制御の設計理論を構築します.
● データ駆動型システム解析と制御
動的システムを解析する際の標準的なアプローチは,「計測データ ⇒ 数理モデル ⇒ 解析結果」という手順に従うことです. しかし,計測データが不十分な場合には,精度の良い数理モデルが得られず,手順の途中で断念することもあります. そこで,計測データから,モデルを構築することなく,直接,解析結果を得る,すなわち「計測データ ⇒ 解析結果」という データ駆動型のアプローチが近年注目を集めています.本研究室では,データ駆動型アプローチが本質的に必要となる解析問題や制御問題の特徴付けと, 具体的な解法の開発を行います.
● 先端科学分野や産業界への展開
研究プロジェクトや企業との共同研究を通じて,開発した制御理論を先端科学分野や産業界に展開します.現在,実施中のプロジェクトは 以下の通りです.
- 科学研究費補助金 基盤研究(A):エネルギー管理システム
- 創発的研究支援事業:オープン群知能学の創成
- 科学研究費補助金 学術変革(A):分子サイバネティックス
- ムーンショットプロジェクト:疾患の予兆検出と予防
教員の主な著書
教員の主な著書は以下の通りです.この中のいくつかでは本研究室の研究内容に関する情報が掲載されています.
東,永原,石井,林,桜間,畑中:
マルチエージェントシステムの制御 (システム制御工学シリーズ22),コロナ社 (2015)
井村,東,増淵:
ハイブリッドシステムの制御 (システム制御工学シリーズ20),コロナ社 (2014)
詳細はこちらをご覧下さい.
川田,東,市原,浦久保,大塚,甲斐,國松,澤田,永原,南:
倒立振子で学ぶ制御工学 ,森北出版 (2017).

青木,川田,細井,成田,芝原,花村,高木,高比良,東,大塚:
機械系大学院への四力・制御問題精選,培風館 (2022).